Yizhuo Xu(许义卓)
Yizhuo Xu obtained his Bachelor degree in Tianjin University at 2021 and Master degree in Huazhong University of Science and Technology (HUST) at 2024. He is now a RA of Bin Su’s Group at HUST with research interests focus on materials science/bioengineering, especially the wearable bioelectronics and flexible electronics.
Main Research Projects
Flexible Electronics, Tactile sensors, Soft Robotics, Machine Learning, Interdiscipline
Yizhuo XU, Shanfei ZHANG, Shuya LI, Zhenhua WU, Yike LI, Zhuofan LI, Xiaojun Chen, Congcan SHI, Peng CHEN, Pengyu ZHANG, Michael D. DICKEY*, Bin SU*
npj Flexible Electronics 8, 2 (2024) Highly Cited Paper
Abstract
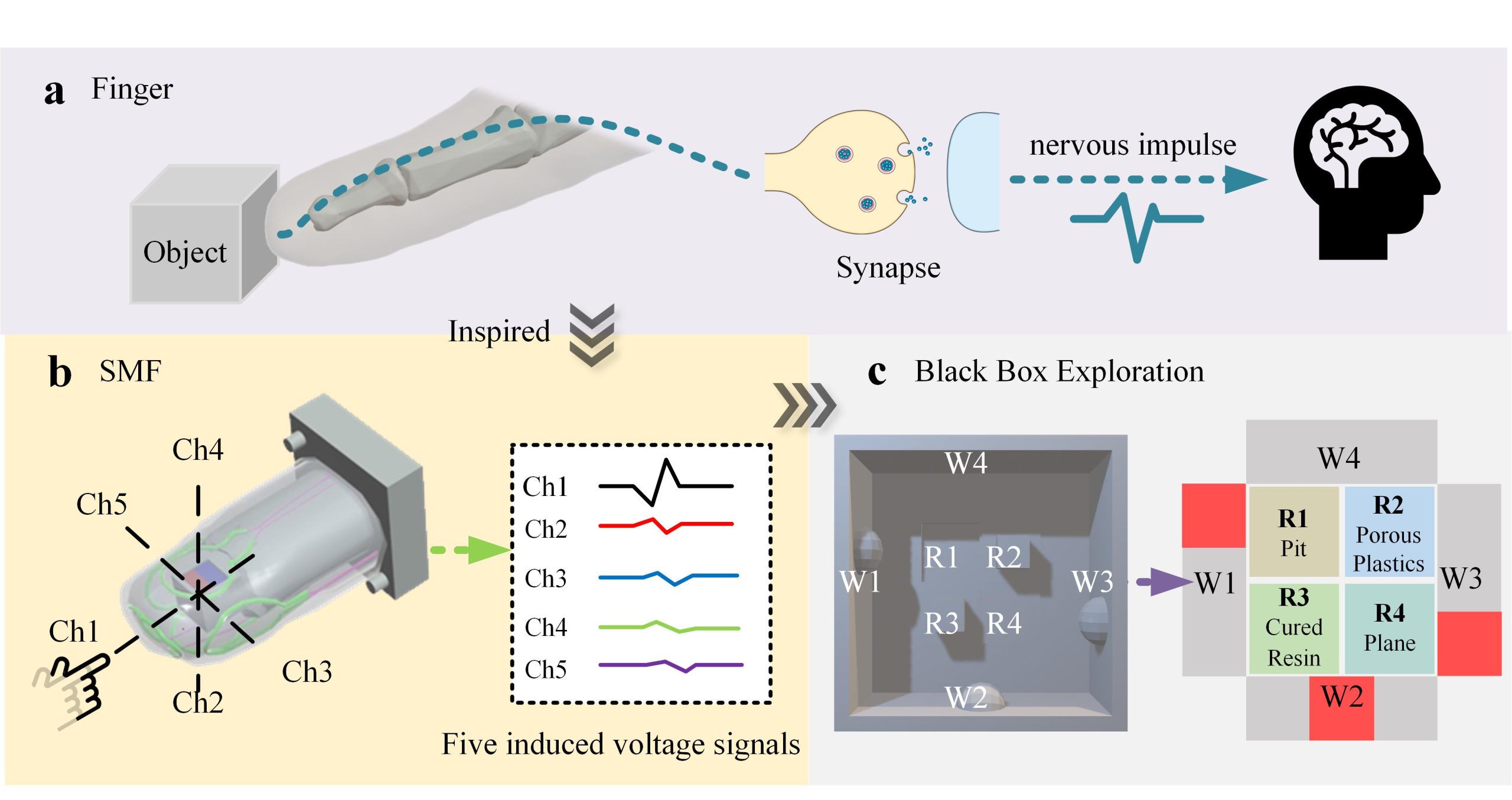
Robotic fingers with multidirectional tactile perception are of great importance for the robotic exploration of complex unknown space, especially in environments in which visualization is not possible. Unfortunately, most existing tactile sensors for robotic fingers cannot detect multidirectional forces, which greatly limits their potential for further development in navigating complex environments. Here, we demonstrate a soft magnetoelectric finger (SMF) that can achieve self-generated-signal and multidirectional tactile sensing. The SMF is composed of two parts: a ‘finger’ covered with a skin-like flexible sheath containing five liquid metal (LM) coils and a ‘phalangeal bone’ containing a magnet. Due to the changes in magnetic flux through the LM coils caused by external forces, diverse induced voltages are generated and collected in real-time, which can be explained by Maxwell’s numerical simulation. By the analysis of the signals generated by the five LM coils, the SMF can detect forces in varied directions and distinguish 6 different common objects with varied Young’s moduli with an accuracy of 97.46%. These capabilities make the SMF suitable for complex unknown space exploration tasks, as proved by the black box exploration. The SMF can enable the development of self-generated-signal and multidirectional tactile perception for future robots.

Ultra‐Fast Shape‐Deformation and Highly‐Sensitive Detection of 4D Printed Electromagnetic Architectures
Shanfei ZHANG#, Yizhuo XU#, Zhuofan LI, Yike LI, Zhongjiu LU, Xiaojun CHEN, Peng CHEN, Manhui CHEN, Pengyu ZHANG, Chao CAI, Qi WANG, Bin SU*
Advanced Functional Materials, 2402563 (2024)
Abstract
4D printing is widely used in soft actuators, flexible electronic devices, and soft robotics. However, existing 4D printed architectures suffer from drawbacks such as long shape-deformation response time or low sensitivity to external stimuli, which greatly limit their applications. To address these shortcomings, 4D printed electromagnetic architectures (EMAs) with both ultra-fast shape-deformation and highly-sensitive detection capabilities have been proposed in this study. The EMA is composed of a 4D printed polymeric scaffold, along with magnetic and conductive parts. Experiments show that the EMA exhibits not only an ultra-fast shape-deformation response time as low as 0.007 s but also a high sensitivity to detect an external pressure down to 0.4 Pa, which is beyond records of all current 4D printing reports. Numerical simulation reveals the rapid shape-deformation and sensing mechanism of EMAs. The effects of cell structures on the performances of EMAs are investigated by parameter optimization. Finally, a “sensing-to-deforming” system has been demonstrated, which can smartly distinguish objects by pressures and then trap or release them by the shape deformation. This work realized the effective coupling of ultra-rapid shape-deformation and ultra-low stress sensing of 4D printed architectures and provided an effective method for integrated development of smart devices in deformation and sensing.

Soft Magnetoelectric Skin for Humanoid Robots’ Multidirectional Tactile Sensing
Yizhuo XU#, Shanfei ZHANG#, Shuya LI, Zhuofan LI, Xiaojun CHEN, Yike LI, Manhui CHEN, Peng CHEN, Pengyu ZHANG, Bin SU*
Advanced Materials, Under Review
Abstract
The evolution of multidirectional tactile e-skins leans towards sensing more directions with less sensing units. Flexible magnetoelectric skins, as a self-powered and robust solution, is expected to meet this development demand. Imitating human skin, we proposed a novel soft magnetoelectric skin (SMES) uniting a force-magnetic coupling layer consisted of Ecoflex and magnetic composite with an electromagnetic induction layer consisted of PDMS and four copper coils. Numerical simulation revealed its self-powered multidirectional sensing mechanism. A tailored machine learning model empowers the SMES to precisely detect vertical forces at 25 points and tangential forces in 12 directions based on only four coils, with an accuracy of 96.01%. Compared to existing self-powered e-skins, the SMES can achieve more directional tactile sensing with fewer sensing units. Integrated onto a humanoid robot, the SMES could enhance its multidirectional tactile sensing capability. It also showcases underwater human-computer interaction potential via a Snake game.

Programmed Temporal Modulation by using A Magnetoelectric Dressing System for Ultra-Fast Early-Stage Wound Healing
Baoying ZHAO#, Jiwei SUN#, Yizhuo XU#, et al.
In Submission
Abstract
To be continued
To be continued…
Any projects about bioengineering or materials science…